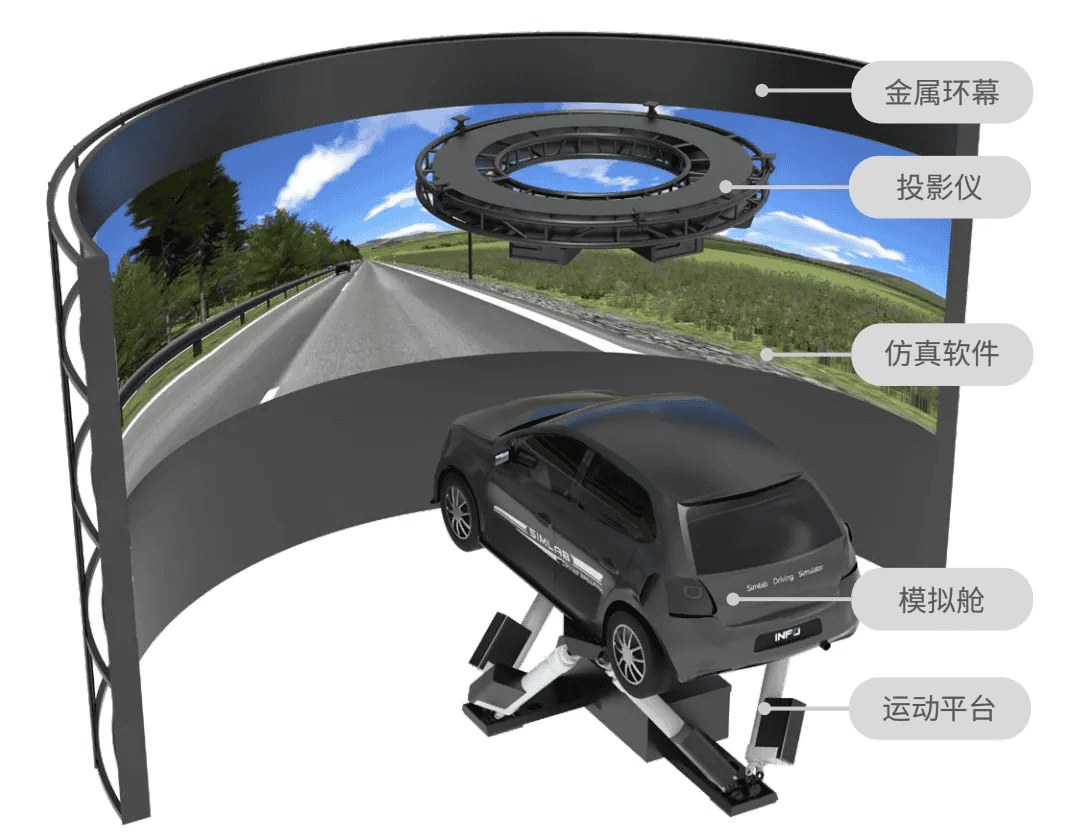
驾驶模拟器硬件示意图

驾驶模拟器的交互部件

SIMLAB八轴六自由度驾驶模拟器

SIMLAB单座驾驶模拟器
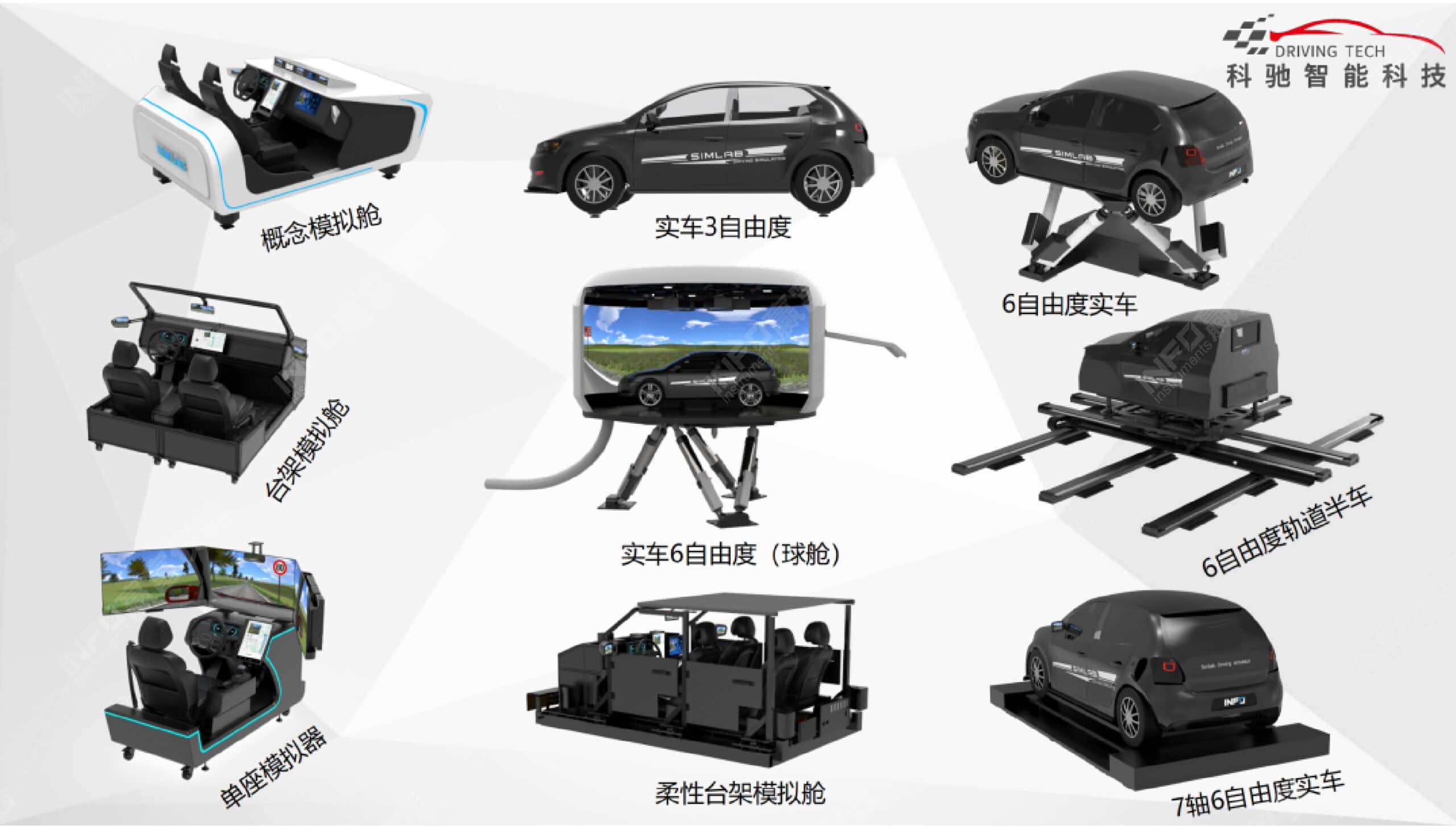
SIMLAB驾驶模拟器全家福

DG3可穿戴式眼动仪

Smarteye遥测式眼动仪




PhysioLAB无线生理仪

gFace面部表情检测系统
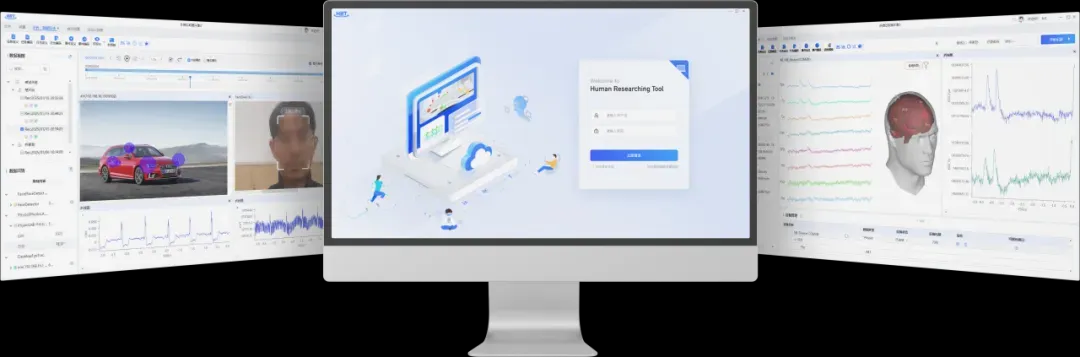
HRT多模态行为同步研究平台
驾驶模拟器输出的车辆运动学数据,为客观分析驾驶分心对驾驶行为的影响提供了依据,有助于研究者比较不同分心方式的具体效应。基于驾驶模拟器实验数据,构建有效的驾驶分心实时检测算法,正逐步成为该领域未来的重要研究方向。

开车使用手机造成驾驶分心
提供设计依据: 基于驾驶模拟器实验的结果,可为道路设计规划提供有力的数据支持和参考依据。
提升仿真精度: 通过将驾驶模拟器实验结果与相似道路的实地实验结果进行对比分析,可以校准和修正模拟器中的相关参数,从而显著提高仿真道路设计方案的模拟精度和结果可信度。
同时,驾驶模拟器也日益成为评价和改善现有道路的重要工具。例如,通过模拟器可系统性地追踪记录不同经验驾驶员对各类车道线设计(如宽度、颜色、样式)的反应(包括视觉识别效率、空间感知能力、适应性以及行驶速度、轨迹保持、驾驶负荷等指标)。这些关键数据为优化车道线设计、评估路段通行效率及整体安全性提供了科学支撑。

道路工程设计
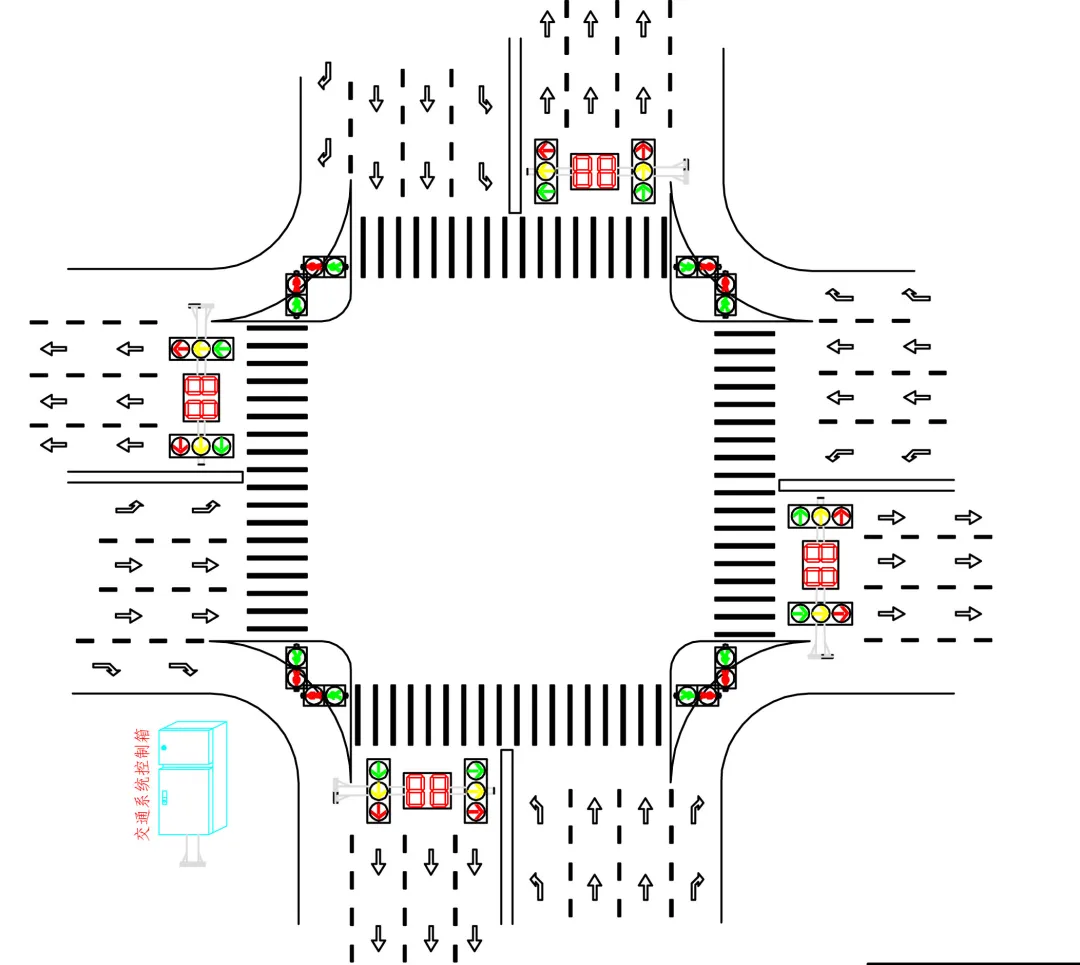
交通灯设计

疲劳驾驶与违规驾驶行为

驾驶模拟集群

驾驶模拟集群
微观交通流实时映射:精准映射VISSIM、SUMO等微观交通流仿真软件车辆、行人、信号灯等数据,为构建城市级交通数字孪生与虚实融合奠定坚实的基础。