法国土伦大学机械和机器人实验室(COSMER)的机器人专家和计算机视觉研究人员使用Qualisys运动捕捉系统采集地面实况数据,进行实时追踪。

COSMER实验室具有强大的科研团队,汇集了Supmeca-Toulon的教师/研究科学家,以及来自该大学理工学院的机械与生产自动化工程(GMP)、工业工程与维修(GIM)和多媒体与互联网技术(MMI)等专业的教师/研究科学家。
该实验室隶属于土伦大学信息、数字、预防(INP)和海洋、环境与可持续发展(MEDD)两个专业,旨在推动土伦大学在该区域的发展,促进该国和欧洲各级实验室间的项目开展。
COSMER实验室的研究方向:
1.海洋、陆地及两栖机器人(RMMAT),尤其是机器人在水中、陆地上的移动能力和自主性。
2.可持续机械系统(EOSMD)的生态设计和优化,专注于复杂系统的优化方法。
海洋、陆地及两栖移动机器人RMMAT

RMMAT是关于机器人在水中和陆地中的移动能力和自主性研究。设计具有一定运动自主性并能与人互动的水陆两栖机器人是其中一个重大的研究课题。
RMMAT开展四种不同类型的移动性测试:
1.双模/多模态移动性
2.交互式海上移动性
3.海面移动性
4.增加陆地移动性
具体包括以下创新性项目:
- 海洋和陆地移动机器人的机电一体化设计(船体,外壳,运动学,机械/机电一体化结构,机动化,推进/稳定/转向组件)
- 海洋和两栖机器人的控制-指挥技术的充分性(稳定性维护,动态运动,质量中心和推力控制,行为转换,障碍,可穿越性等)
- 感知系统,传感器参考控制,适应环境的人机界面(传感器仪表,传感器包络,计量,数据融合,定位,鲁棒状态估计,控制,安全)
该项目的机器人将应用于海洋和沿海环境中的勘探、监测、干预和救援等工作。
可持续机械系统的生态设计与优化EOSMD
EOSMD研发的目的是,开发与可持续发展相适应的机械系统的设计和优化方法,同时要考虑所涉及的各种环境、社会和经济目标,以及系统将要面临的日益复杂情况(互联能源生产系统、可持续移动性、可持续外罩等)。
机械系统的生态设计涉及到与系统生命周期的每个主要阶段(提取+制造+分配、使用、报废)的改进有关的科学问题。
可持续复杂系统的优化问题让工程师们意识到系统正变得越来越复杂,因此,它们的技术、经济和环境优化不能基于简单的设计迭代方法。
Qualisys运动捕捉系统
✔ 5个 Miqus Underwater 水下摄像机
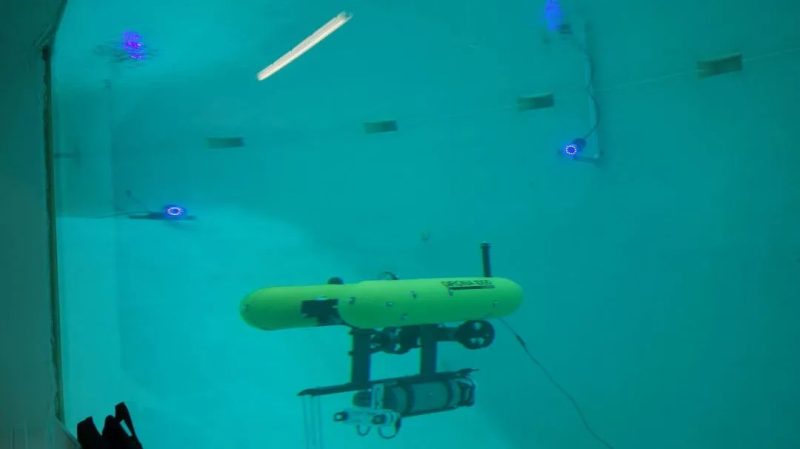
Qualisys水下运动捕捉系统具有高精度、高实时性,能长时间在深水中工作等特点,特别适合水下无人设备的研发测试。COSMER实验室的研究人员将其运用到多个研究项目中。
无人航行器与潜水员的交互

Qualisys运动捕捉系统安装在水下,对潜水员进行自主监测,并采集相关的运动状态数据、进行初步评估。
无人航行器与潜水员的交互研究包括:
- 机器人和潜水员的状态评估
- 通过视觉/声学数据融合对潜水员进行监测和追踪
- 手势/信号的识别
- 潜水员潜水时对AUV的控制
验证算法RMMAT

这一项目是与西班牙赫罗纳大学的水下机器人研究中心 (CIRS)进行合作。该项目是利用CIRS的机器人和底层结构,通过基于Qualisys运动捕捉系统定义的地面实况数据,来测试COSMER开发的算法。
在2021年的一次测试中,研究人员在一周内获得了近300个序列,并进行了6组不同的实验:
- 水下机器人水动力参数的评估
- 智能卷筒的研制
- 用于控制机器人绳索的缆索形状的视觉评估潜水员位置的声学评估
- 识别潜水员的动作
- 水下SLAM数据库的创建
2023年年初,土伦大学Christophe, Juliette等人在 Ocean Engineering 杂志发表了关于利用无人潜水器(ROV)的缆索形状对其进行定位的论文。(DOI:10.1016/j.oceaneng.2022.113570)
ROV的缆索可以实时传输信息或为机器人提供能源,但也存在缠绕或者难以预测其形状等问题。这就引发了是否可以不用缆索的问题。为了将这些劣势转化为优势,论文作者提出了一种通过观察ROV缆索形状来估计其姿态的方法。缆索配备有移动压载物和浮标,使其具有可预测的直线形状,无需机械或者TMS,易于架设。由此可以定义缆索的简单数学模型。利用这些模型和测量电缆末端的角度,可以确定ROV的位置。由此,他们提出了三种不同设备的缆索形状的数字模型,用于确定ROV的位置。
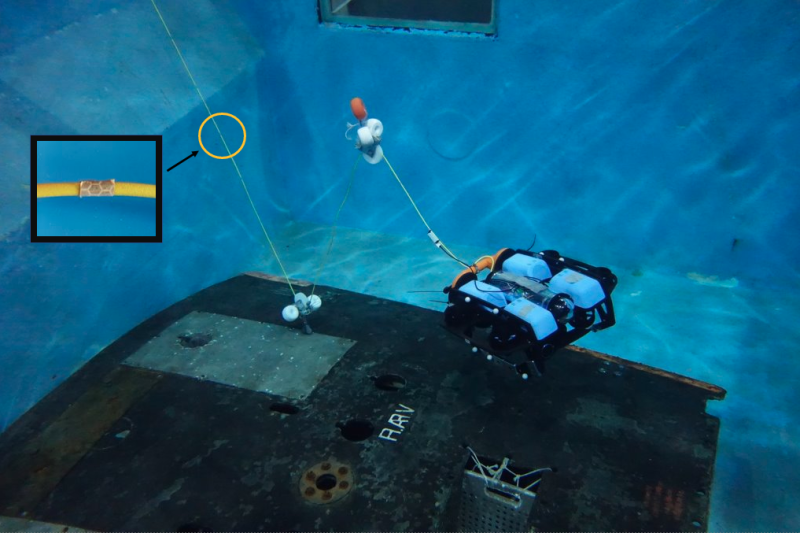
缆索上的反光标记点
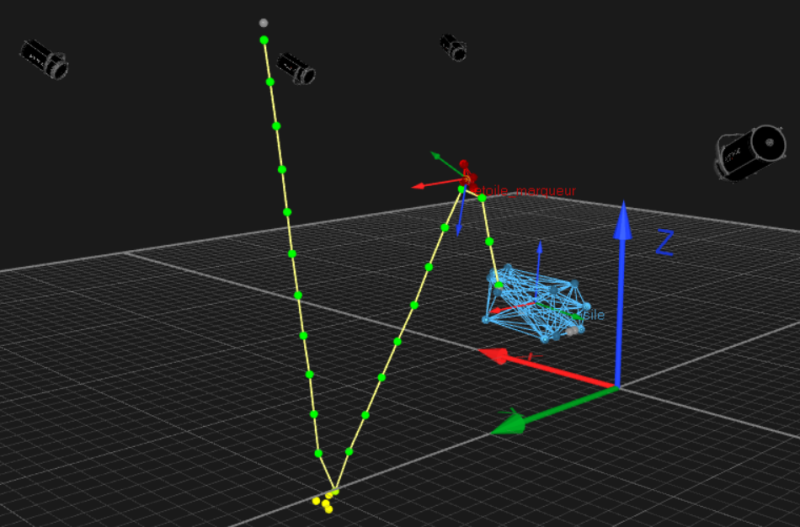
QTM软件中缆索的形状(绿色为反光标记点)
该实验的测试在泳池进行。缆索上安装了反光胶带制成的标记点,每隔20cm贴一个,然后通过Qualisys水下运动捕捉系统采集数据。标记点胶带足够薄,不会影响缆索的运动。Qualisys水下运动捕捉系统由5个 Miqus Underwater水下摄像机组成(4个摄像机固定在水池边缘,1个摄像机放置在水池底部),采集ROV运动时缆索的位移。使用QTM软件处理数据,对每一个标记点进行定位。然后,研究人员将缆索形状的预估结果与运动捕捉系统采集的实际位置进行比较、验证。